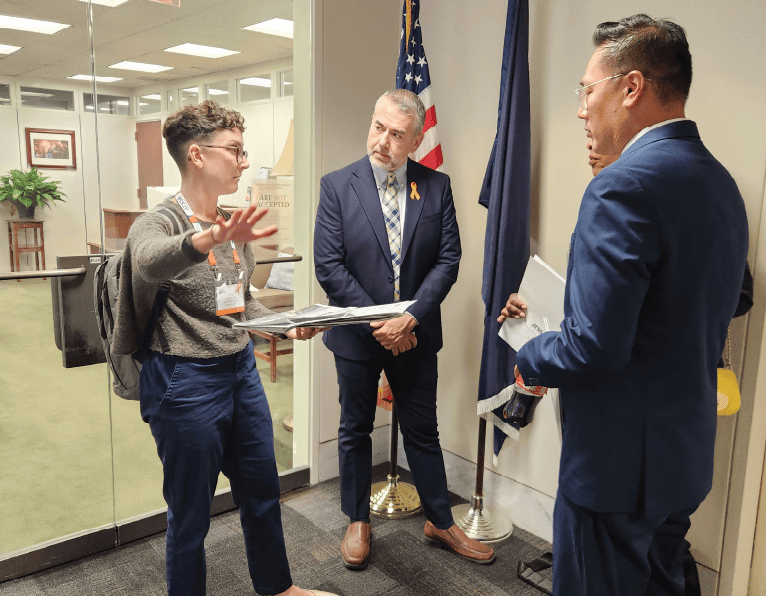
ATSSA members campaign for roadway safety on Capitol Hill
ATSSA members campaign for roadway safety on Capitol Hill Buy America, Federal Highway Trust Fund are key topics at Fly-In….

Fourteen workers honored at NWZAW national kickoff
UPDATE: A video of the event is now available. NEWS RELEASE Contact: Maria Robertson ATSSA Director of Marketing & Communications…
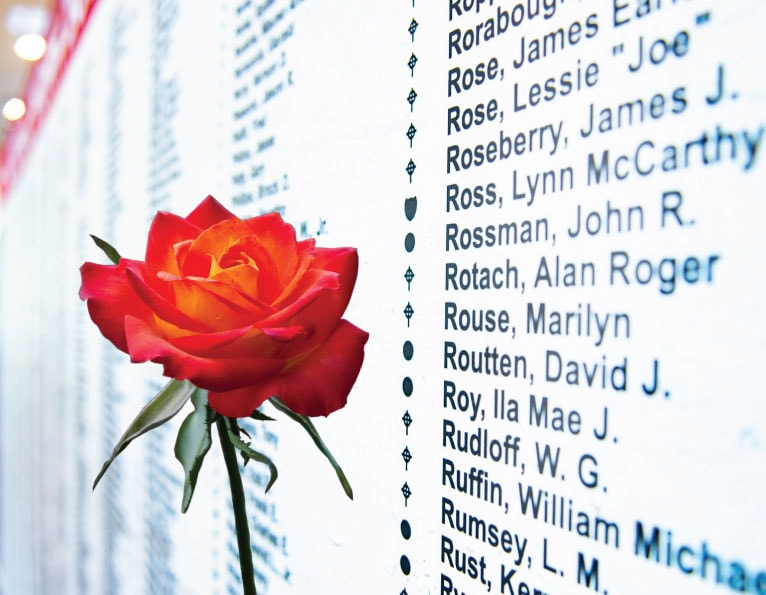
Host the National Work Zone Memorial to honor roadway workers
Host the National Work Zone Memorial to honor roadway workers Recent worker deaths demonstrate risks of roadway work The recent…

Maryland workers to be honored at NWZAW national kickoff
UPDATE 2: A fact sheet from FHWA is now available with updated statistics. UPDATE: Federal statistics just released provide updated…

ATSSA issues statement regarding Key Bridge collapse in Maryland
ATSSA issues statement regarding Key Bridge collapse in Maryland Rescuers are searching for six roadway workers UPDATE: The Associated Press…

Horizon Signal auction raises $38k for the ATSS Foundation
Horizon Signal of Reading, Pa., raised $38,000 for the ATSS Foundation through an online auction during the month of February….
FHWA releases proposal to eliminate longstanding Buy America waiver
The Federal Highway Administration (FHWA) on Thursday released a Notice of Proposed Rulemaking (NPRM) announcing its intention to discontinue the…
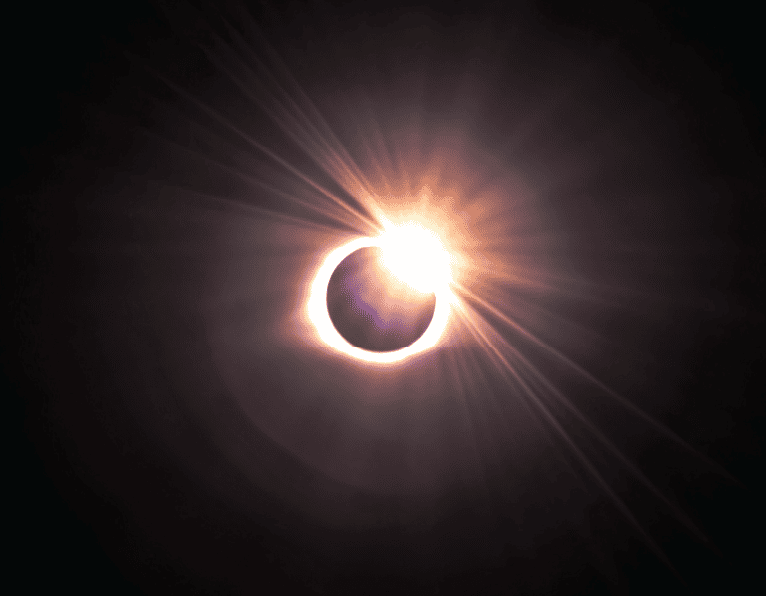
April solar eclipse provides ATSSA members opportunities to utilize resources, expertise
With the highly anticipated total solar eclipse expected on April 8, roadway safety professionals across the U.S. have an opportunity…
ATSSA Town Hall: Build America, Buy America, an FHWA Update on Feb. 21
Virtual Town Hall will present new insights on Build America, Buy America with commentary from a member of the FHWA…
3M raises more than $15K for ATSS Foundation through TZD Pledge Wall
Funds raised this year exceed the 2023 total This year’s Toward Zero Deaths Pledge Wall sponsored by 3M raised $15,813…

Members advance safety, share innovations at 2024 Convention & Traffic Expo
Save the date for ATSSA’s 2025 event in Orlando, Feb. 28-March 4 ATSSA members pored over the updated version of…

Robotic pavement marking system earns Innovation Award at ATSSA Convention & Traffic Expo
NEWS RELEASE Contact: Maria Robertson ATSSA Director of Marketing & Communications communications@atssa.com Robotic pavement marking system earns Innovation Award…

ATSSA honors three with national awards
NEWS RELEASE Contact: Maria Robertson ATSSA Director of Marketing & Communications communications@atssa.com ATSSA honors three with national awards Awards…

2024 Convention & Traffic Expo starts Friday
2024 Convention & Traffic Expo starts Friday Download the Traffic Expo app for a chance to win fun items ATSSA’s…
ATSSA’s 2023 Annual Report now available
ATSSA’s 2023 annual report is now available and showcases the Association’s activities throughout the year and dedication to “Raising the…

MUTCD gets prominent attention at ATSSA Convention
MUTCD gets prominent attention at ATSSA Convention Innovations, education and groundbreaking speakers await in San Diego Roadway safety industry members…